Viele Ideen wurden hier zum ersten Mal ausprobiert, viele verworfen, manche für gut empfunden.
Die Grundideen waren:
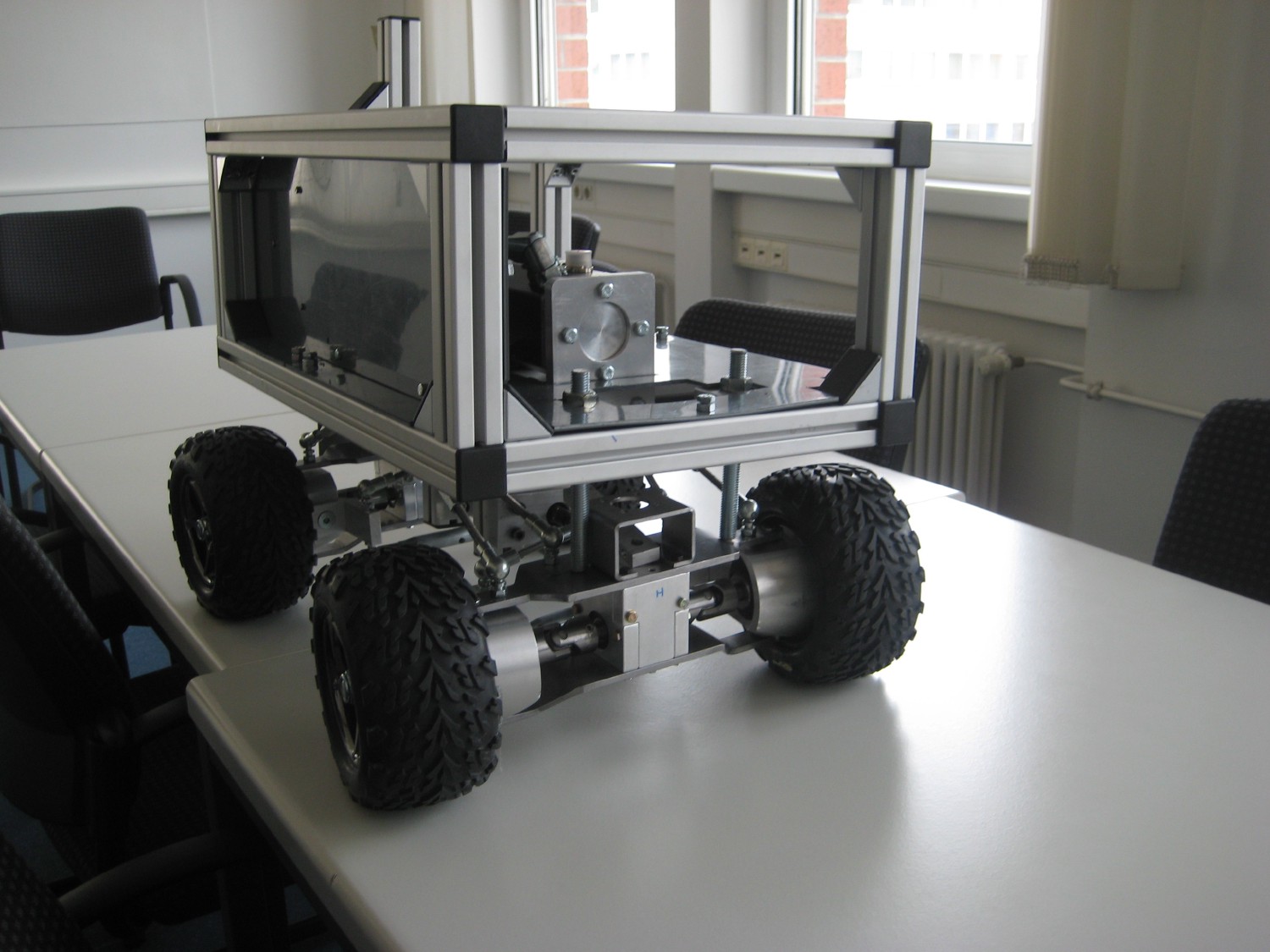
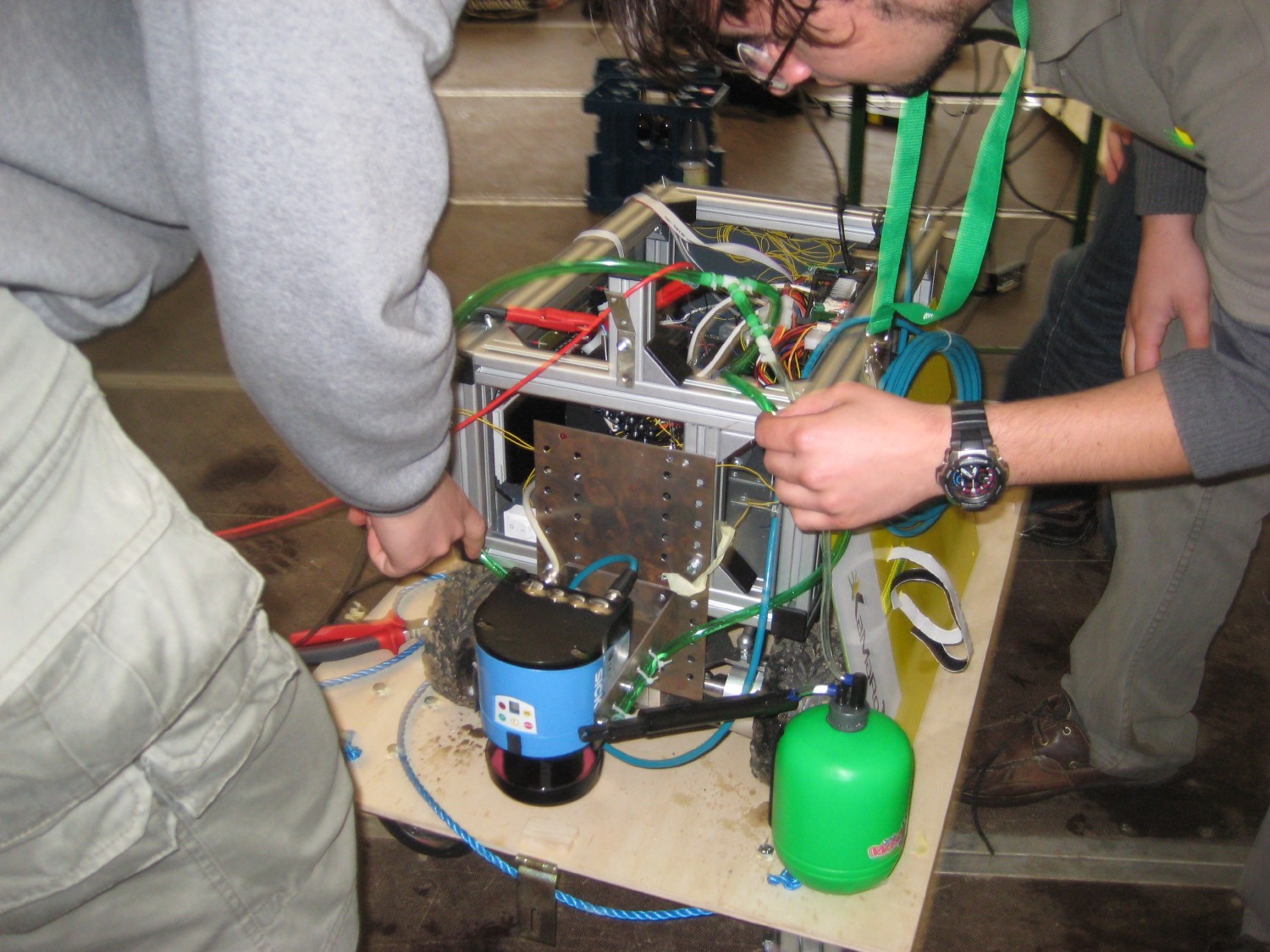
Steuerung des Roboters über vier separat angetriebene und lenkbare Räder
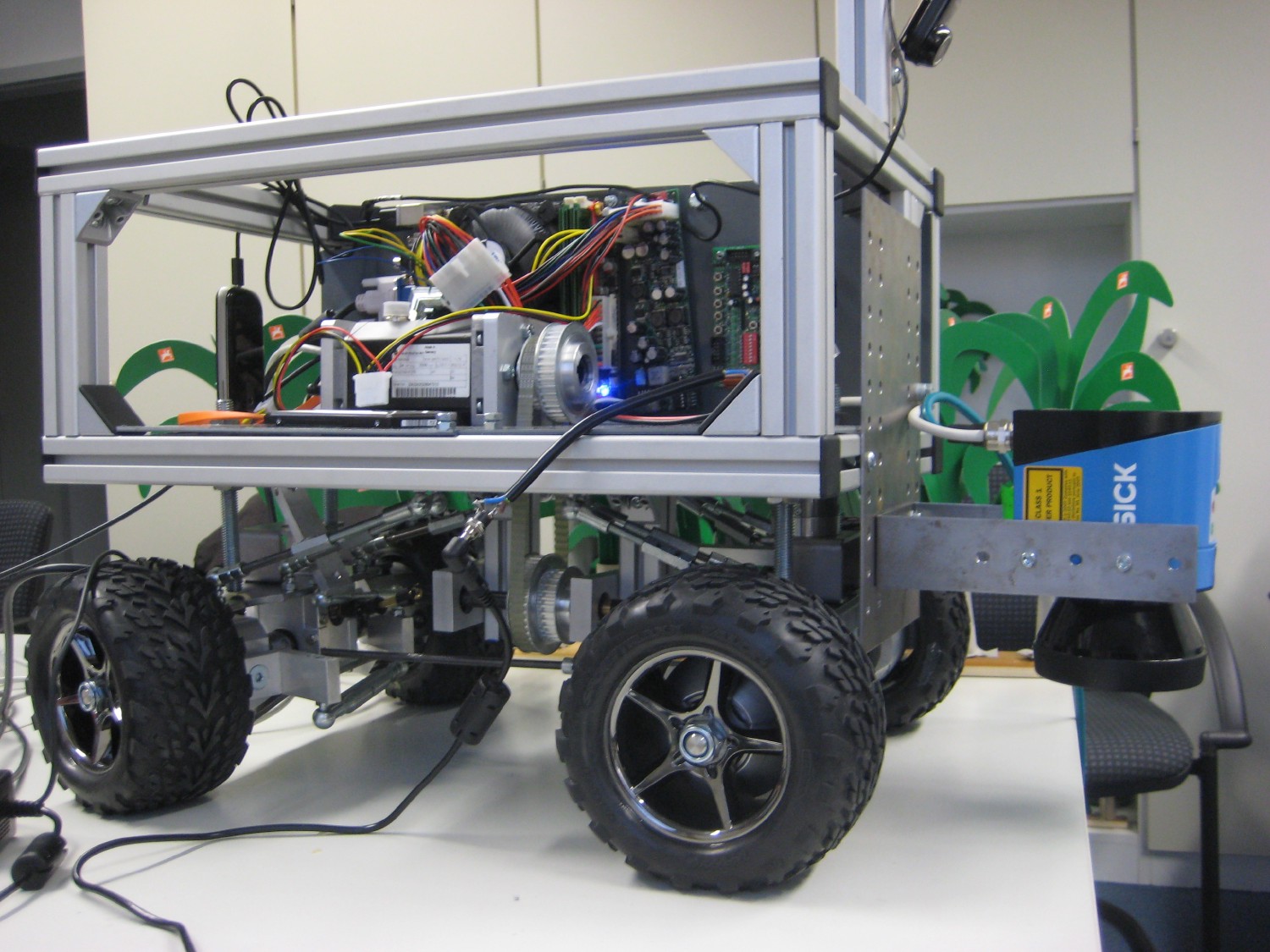
Navigation durch einen Lasersensor mit Unterstützung durch Infrarot und einer Zusammenstoßdetektion
Objekterkennung durch eine Kamera
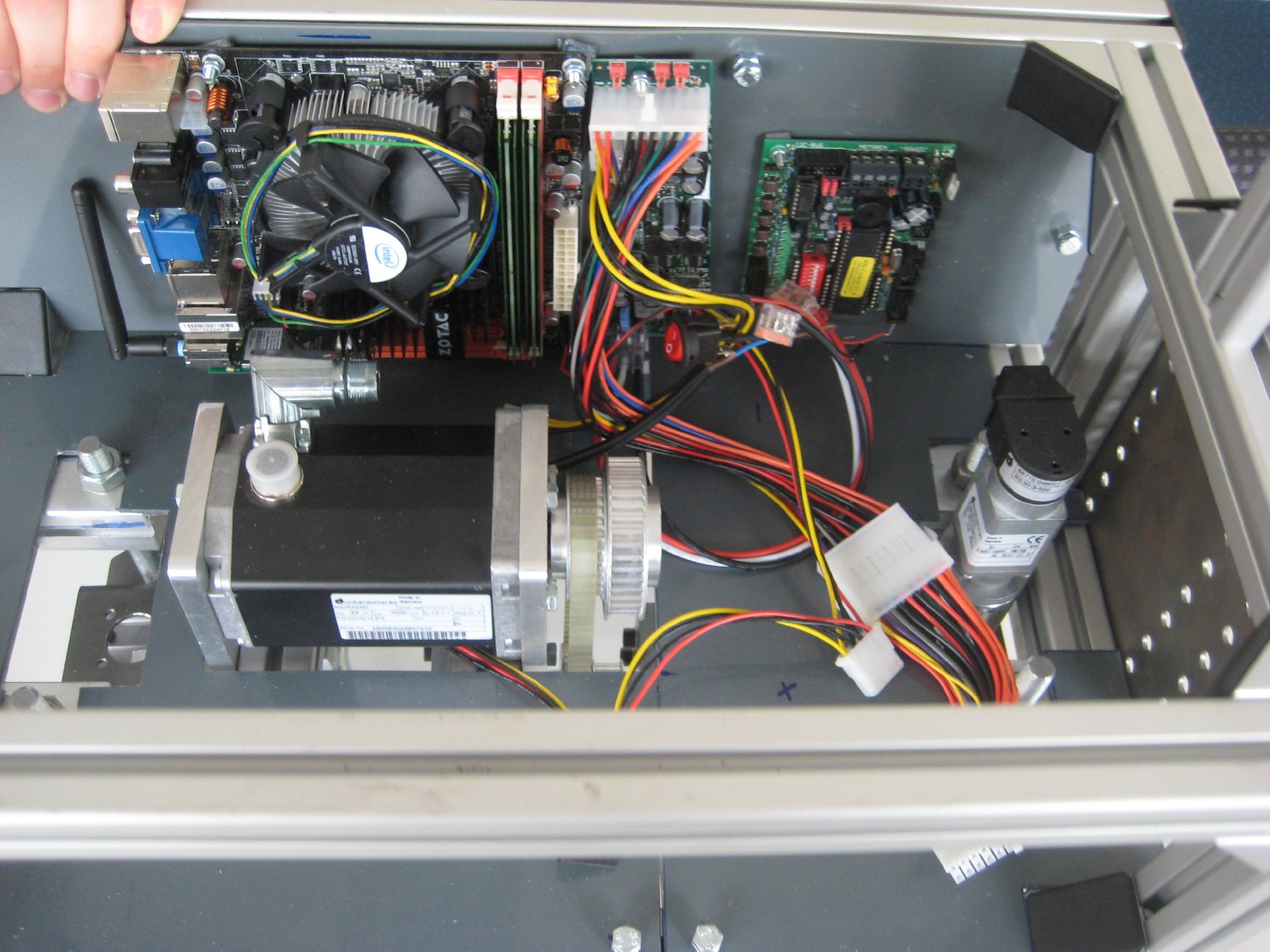
On-board Rechner auf ITX-Board
Viele der hier vorgestellten Konzepte wurden nur teilweise umgesetzt, manche komplett anders. Letztendlich ist daraus Beteigeuze, eine komplette Neukonstruktion, bei der auf viele Details geachtet wurde, entstanden.
Einmal im Jahr feiert das KIT mit Mitarbeitern, Gästen aus Wirtschaft, Forschung und Politik und einigen studentischen Beiträgen seinen Geburtstag.
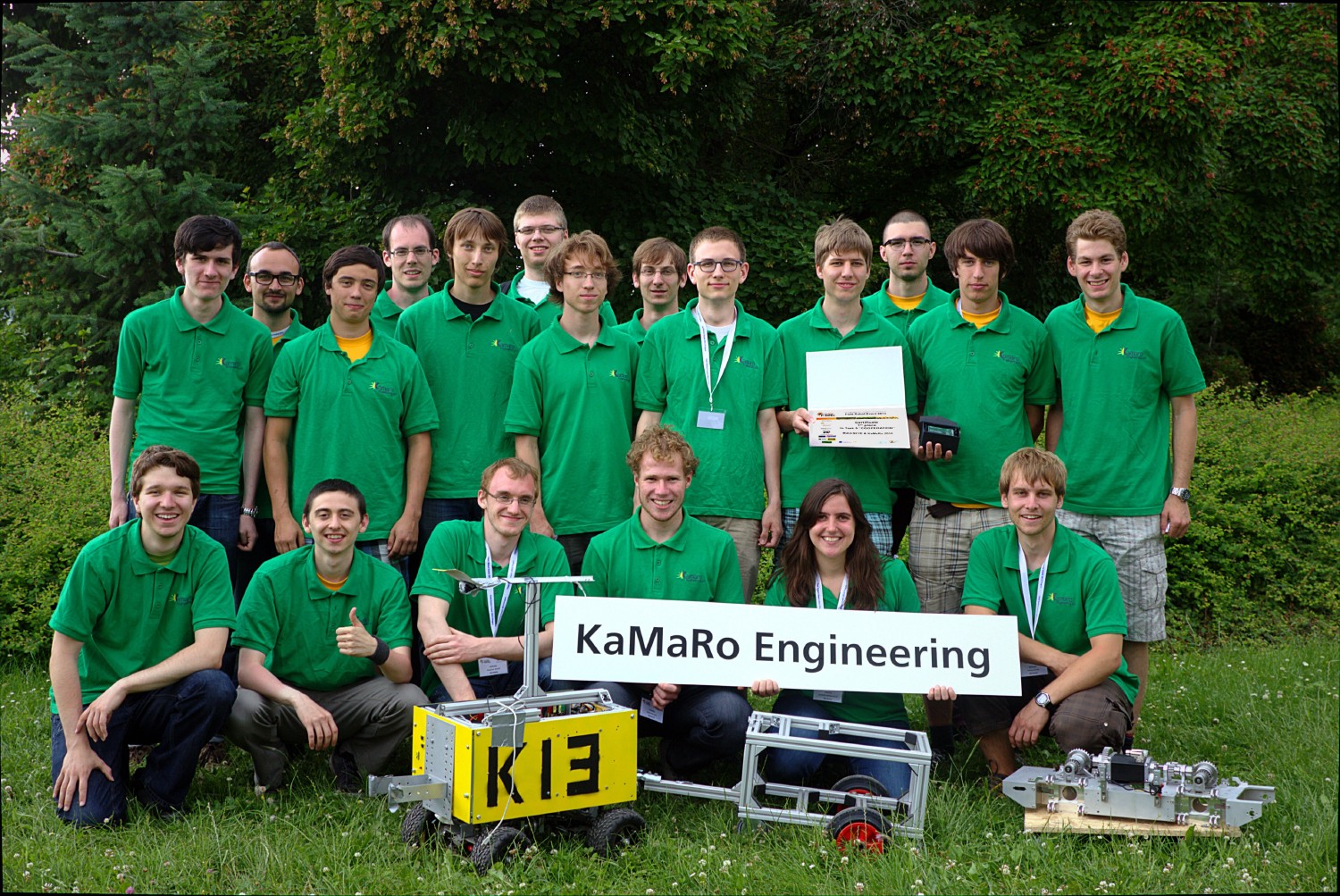
Kamaro ist es gelungen, mit einem interaktiven Lounge-Konzept die Veranstalter rund um Frau Baumgartner von der Abteilung Presse, Kommunikation und Marketing des KIT zu überzeugen und so eine der begehrten Ausstellungsflächen zu ergattern. Am Stand waren die Roboter Kamaro 2010 und Beteigeuze sowie ein Ausblick auf das kommende Projekt Kamaro-Next zu sehen. Mit Videos der vergangenen Wettbewerbe und Exponaten aus der aktuellen Entwicklungsarbeit konnten sich die Besucher einen Einblick in die Welt der Robotik verschaffen.
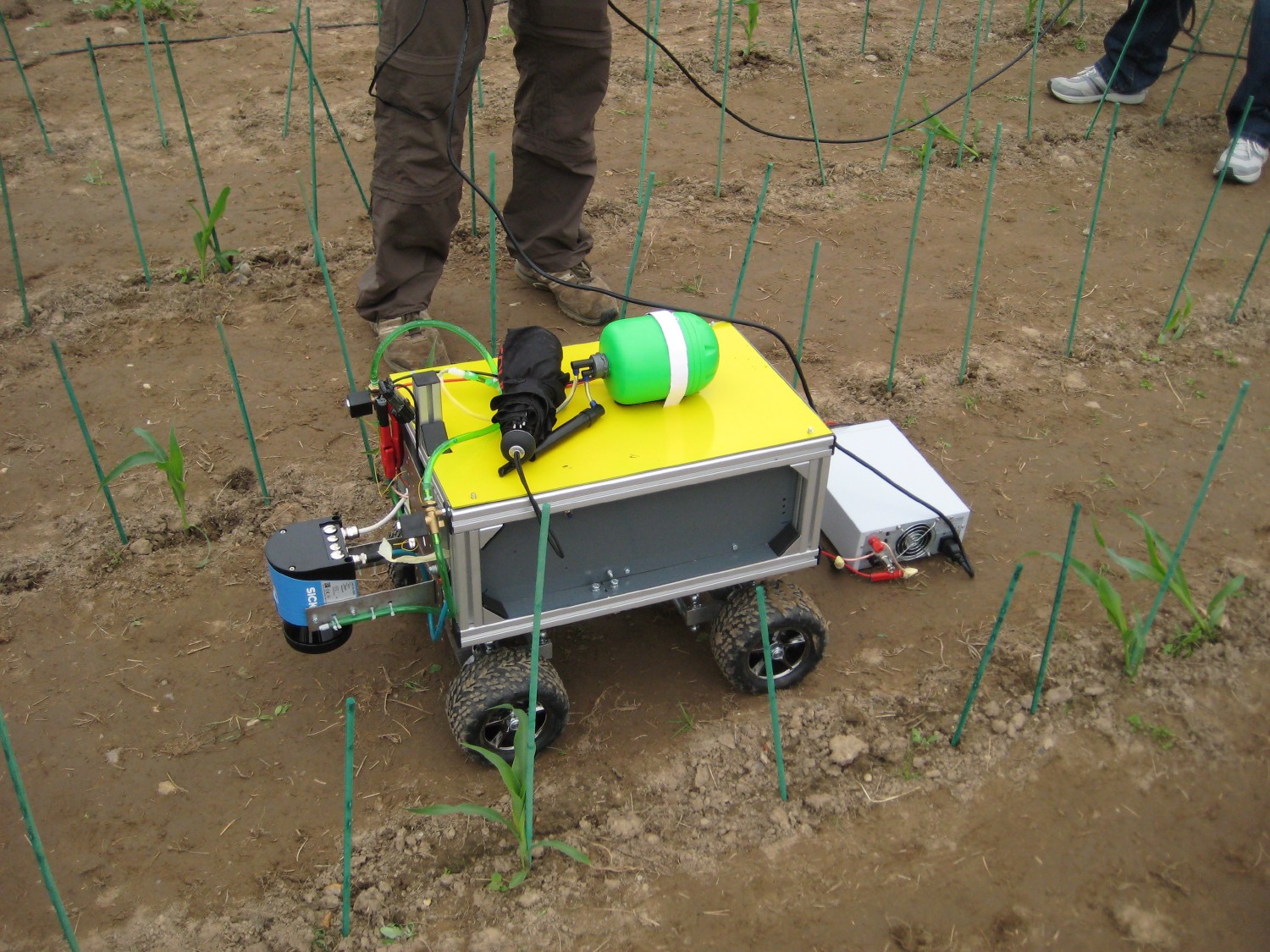
Am Mittwoch den 26.06.2013 macht sich der studentische Verein Kamaro Engineering e. V. aus Karlsruhe auf nach Prag, um beim diesjährigen Field Robot Event, dem internationalen Wettbewerb für autonome Landmaschinen, teilzunehmen.
Beim Field Robot Event werden Aufgaben gestellt, die Problemen aus der Landwirtschaft nachempfunden sind. Die Teilnehmer werden von einer Jury beobachtet, die dann Punkte für erfolgreiche Aktionen, sowie Strafen für Fehler vergibt
Planungsphase - ✓ Abgeschlossen In der Planungsphase haben wir uns überlegt, welche Funktionalität der Roboter bereitstellen soll und wie wir diese am besten gliedern. Dabei sind wir zu folgendem Ergebnis gekommen:
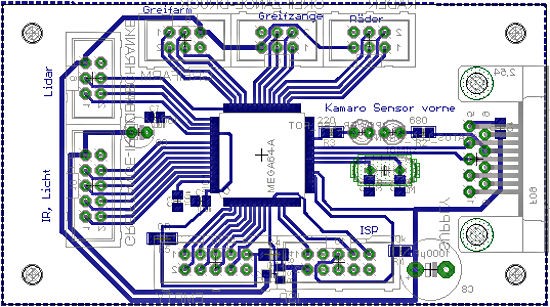
Konzeption Kommunikation und Aufbau
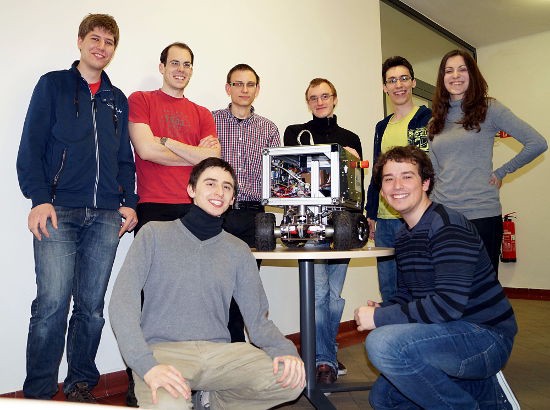
Wir schreiben Freitag den 15.02.2013, ein Teamtreffen steht an – dieses mal ist es aber doch etwas anders: Zum ersten mal wollen wir den Roboter mit unserer neuen Software in Betriebe nehmen und mit eiem Gamepad fahren. Vor einem Monat haben wir erst die Entwicklungsumgebung eingerichtet. Erst vor drei Wochen waren die Stummel für die notwendigen Klassen für diese Aufgabe fertig.