Beim internationalen Field Robot Event (FRE) treten jedes Jahr Hochschulteams aus der ganzen Welt an, um sich an herausfordernden Aufgaben und untereinander zu messen.
Die Aufgaben sind jedes Jahr in fünf verschiedene Tasks aufgeteilt und müssen von den Robotern der antretenden Teams autonom, also ohne Hilfe von außen, gelöst werden. In den ersten beiden Tasks muss die autonome Navigation durch das Feld, einmal ohne und einmal mit Hindernissen gezeigt werden.
Hinzu kommen erweiterte Aufgaben wie Mapping oder das Abfahren komplizierterer Wege durch das Feld. Abgerundet wird das Event immer mit einen Freestyletask, in dem die Teams ihrer Kreativität freien Lauf lassen können, solange das Gezeigte eine sinnvolle Anwendung im landwirtschaftlichen Bereich finden kann. Mit dem vollautomonen Andocken an eine Ladestation (2016) und dem Klasifizieren eines Felds mittels Vegetationsindex (2017) konnte Kamaro bereits zweimal diese Kategorie für sich entscheiden.
Hinzu kommt in manchen Jahren eine Kooperationsaufgabe bei der zwei Teams mit ihren Robotern zusammen eine Aufgabe präsentieren. Kamaro konnte 2013 beim
Field Robot Event in Tschechien die Kooperationsaufgabe mit unserem Roboter
Kamaro 2010 für sich entscheiden.
2017 konnte Kamaro mit dem Gesamtsieg des Field Robot Events in Großbritannien den größten Erfolg in der Vereinsgeschichte einfahren.
In den vergangenen Jahren wurde das Event zur Plattform für innovative Feldroboter, Gedankenaustausch und Zusammenarbeit.
At this year’s Field Robot Event at the University of Maribor in Slovenia, our robot impressively outperformed 14 other competitors in the computer vision-focused Task 3. The task determined the accuracy of the competing robots‘ recognition systems on a series of images of people, deer, and other objects. We also took 2nd place in the Freestyle category and 4th place in the Smart Irrigation task.
We would like to thank our sponsors who supported our participation in the competition with financial resources and hardware. For a deep dive into our methodology, we will soon publish our FRE 2023 proceedings on this blog.
Last year, we published our dataset and models for image recognition during the online Field Robot Event 2021. Our blog post ended with a call for cooperation in creating a dataset and AI models for this year’s event, which has since taken place at DLG Feldtage in June. Team Carbonite from the Überlingen Students’ Research Center (SFZ Überlingen) approached and we subsequently worked together on building a realistic image dataset. As a nod to the two teamnames, this dataset shall henceforth be known by the name “Carbonaro”.
From June 13th to 16th we partook in the annual Field Robot Event, the international field robotics showdown. This year the contest was split in a real world field contest and a virtual field contest which again took place in our virtual maize field simulation environment.
As our name Kamaro (Karlsruhe maize robots) suggests we make maize and robots. While we have been obsessing about the robot part, we have been lacking maize as of late. Also, we were excited about testing our brand-new driving algorithm! So, we set about growing our very own maize field behind building 70.21.
The most important part of planting a healthy maize field was preparing our soil to be fluffy and receptive for our maize seeds. We more or less succesfully employed a marsh rotary tiller.
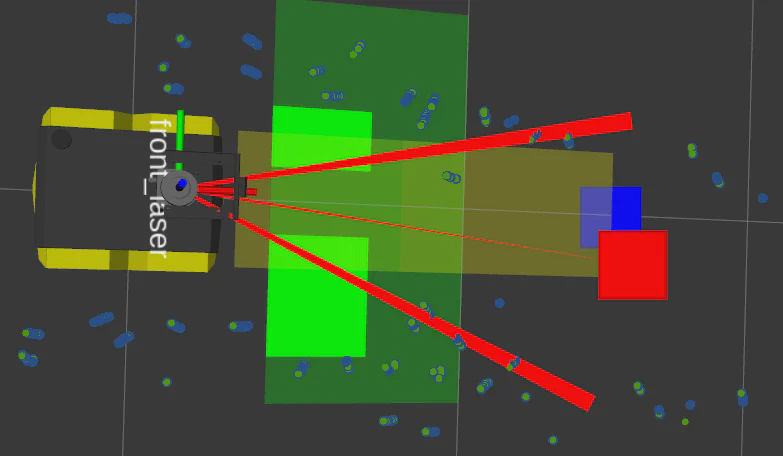
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021. A detailed description of the algorithm is available in the Readme file on Github and in the Proceedings of FRE 2021.
FRE 2021 is over! It’s been a great week seeing all of the other teams again and competing with one another. We are grateful for the opportunity we had in building the competition environment and shaping this year’s Field Robot Event!
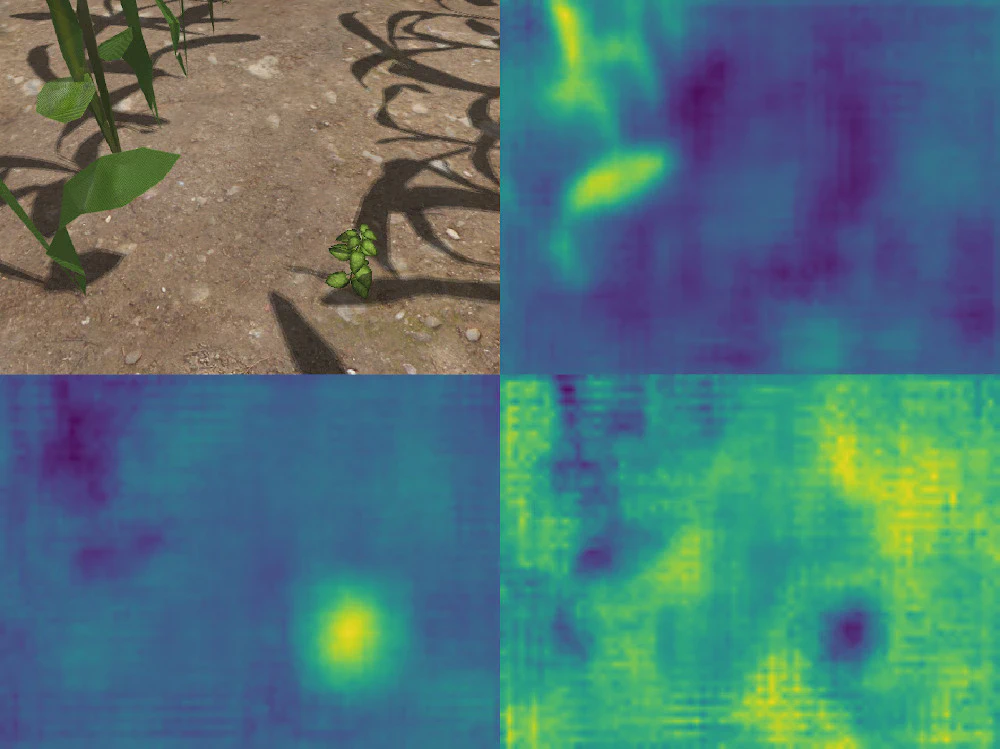
We were especially pleased with the organizers’ decision to include realistic 3D plant models for the weed detection task. For a long time, simple color-based detectors were sufficient to solve the detection tasks at the Field Robot Event. However, such approaches are not adequate to perform a plant recognition task in a realistic scenario. On the real field, robots will have to distinguish between multiple species of plants — all of which are green — in order to perform weeding, phenotyping and other tasks. Deep learning has been around for a few years now and seems to be the most applicable tool to tackle this challenge.
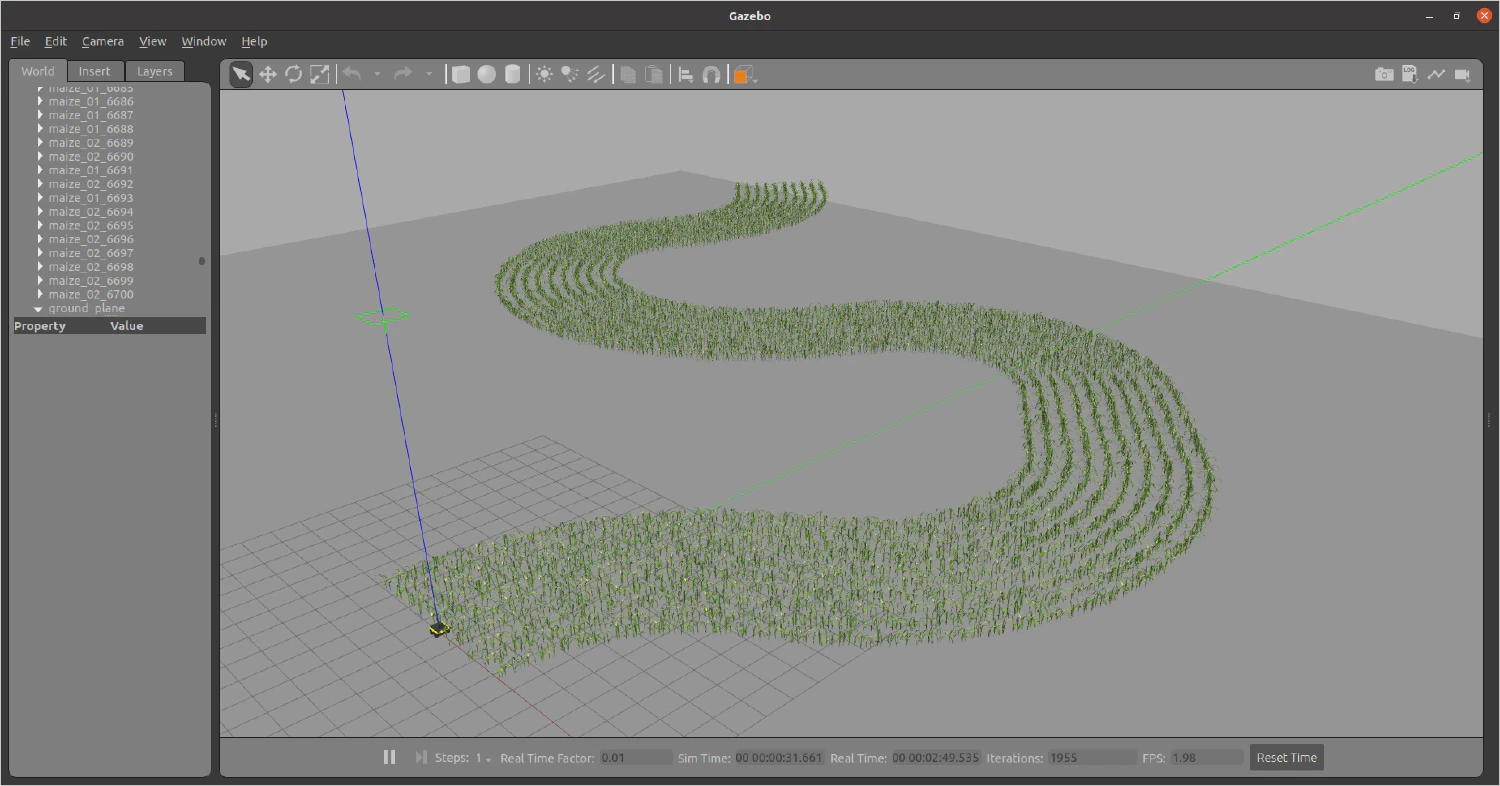
Simulation ist ein Schlüsselfaktor unserer Arbeit bei Kamaro – insbesondere bei Team Informatik. Manchmal wird der Roboter gewartet und ist nicht fahrbereit oder es steht gerade saisonbedingt kein Testfeld zur Verfügung. Um Algorithmen trotzdem testen zu können, setzen unsere Infos eine Simulationsumgebung für Roboter und Maisfeld ein, die in Gazebo erstellt wurde.
Gerade in der Pandemie bringt dies einen weiteren Vorteil: Obwohl eine Arbeit vor Ort teilweise unmöglich geworden ist, können wir bestehende Projekte weiterentwickeln und neuen Code testen – möglich durch Simulation.
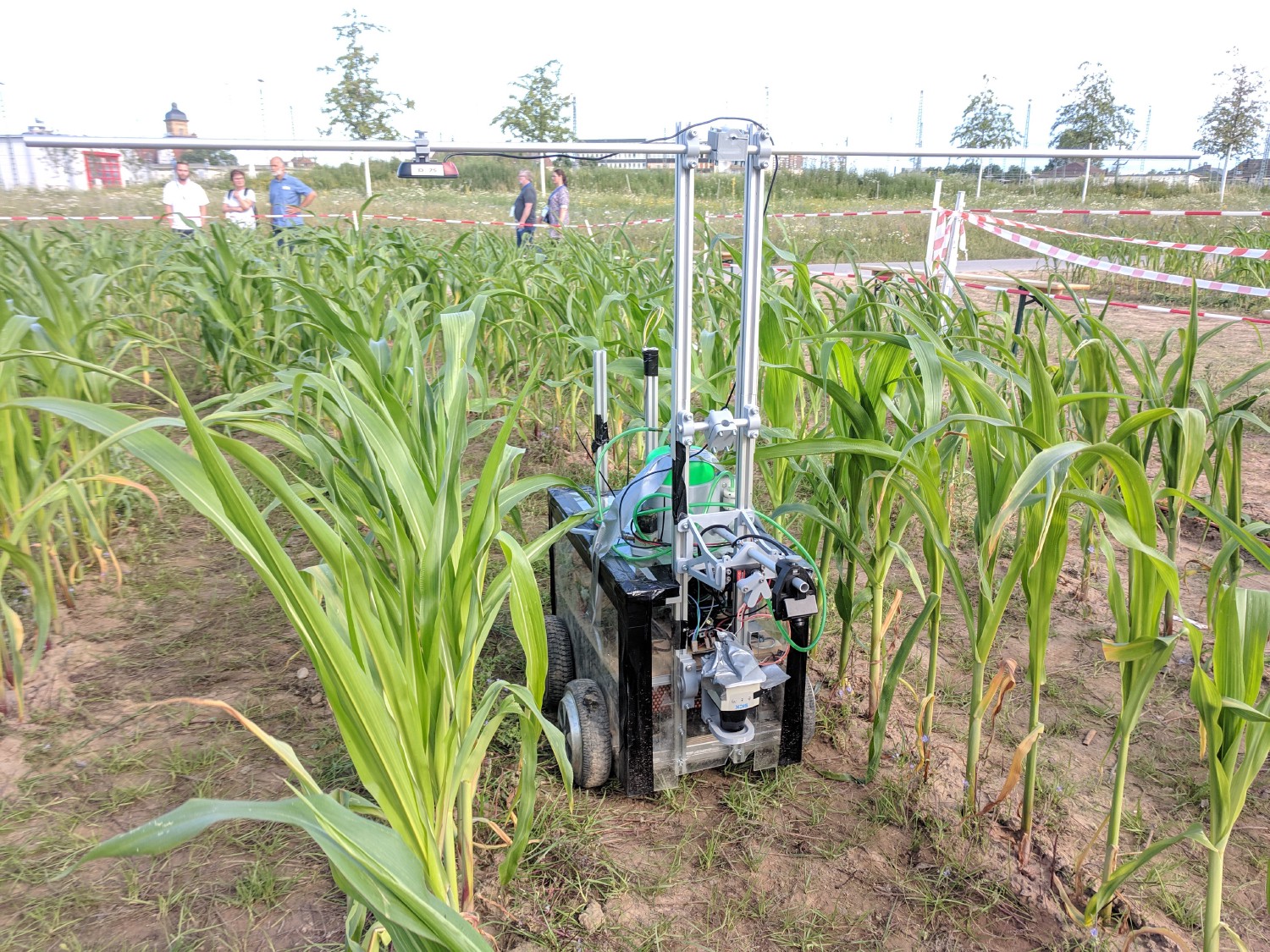
Kamaro participated in the 2019 Field Robot Event and came out in fourth place in the overall ranking, as well as second in the third task (weed detection). This year’s robot was the newly constructed model Dschubba, which utilizes hoverboard wheels and uses a differential steering. Below is a video of our freestyle task, demonstrating deep-learning based selective fertilizing on a mixed-culture field.
Die Reise zum Field Robot Event 2018 startete schon einen Tag früher als gewöhnlich. Das Team FREDT hatte uns eingeladen, sie im nahegelegenen Braunschweig zu besuchen. Nach einer sechsstündigen Autofahrt wurden wir mit einem angeheizten Grill und kühlen Getränken empfangen. Eine Werkstattführung durfte natürlich auch nicht fehlen. Nach einem gemütlichen Abend konnten wir bei einigen Mitgliedern von FREDT zu Hause übernachten, vielen Dank dafür.
Das Field Robot Event 2017 an der Harper-Adams-University geht mit dem bisher größten Erfolg in die jungen Geschichte der Hochschulgruppe Kamaro Engineering ein. In einem spannenden Wettkampf konnte das Team von Kamaro den Gesamtsieg erringen und im Freestyle Task, bei dem die Teilnehmer außerhalb der Wertung ihr Können zeigen, ebenfalls den ersten Platz belegen.